GPU-Accelerated 4K Video Pipeline
CUDA · TensorRT · NVIDIA Orin · Holoscan SDK · C++
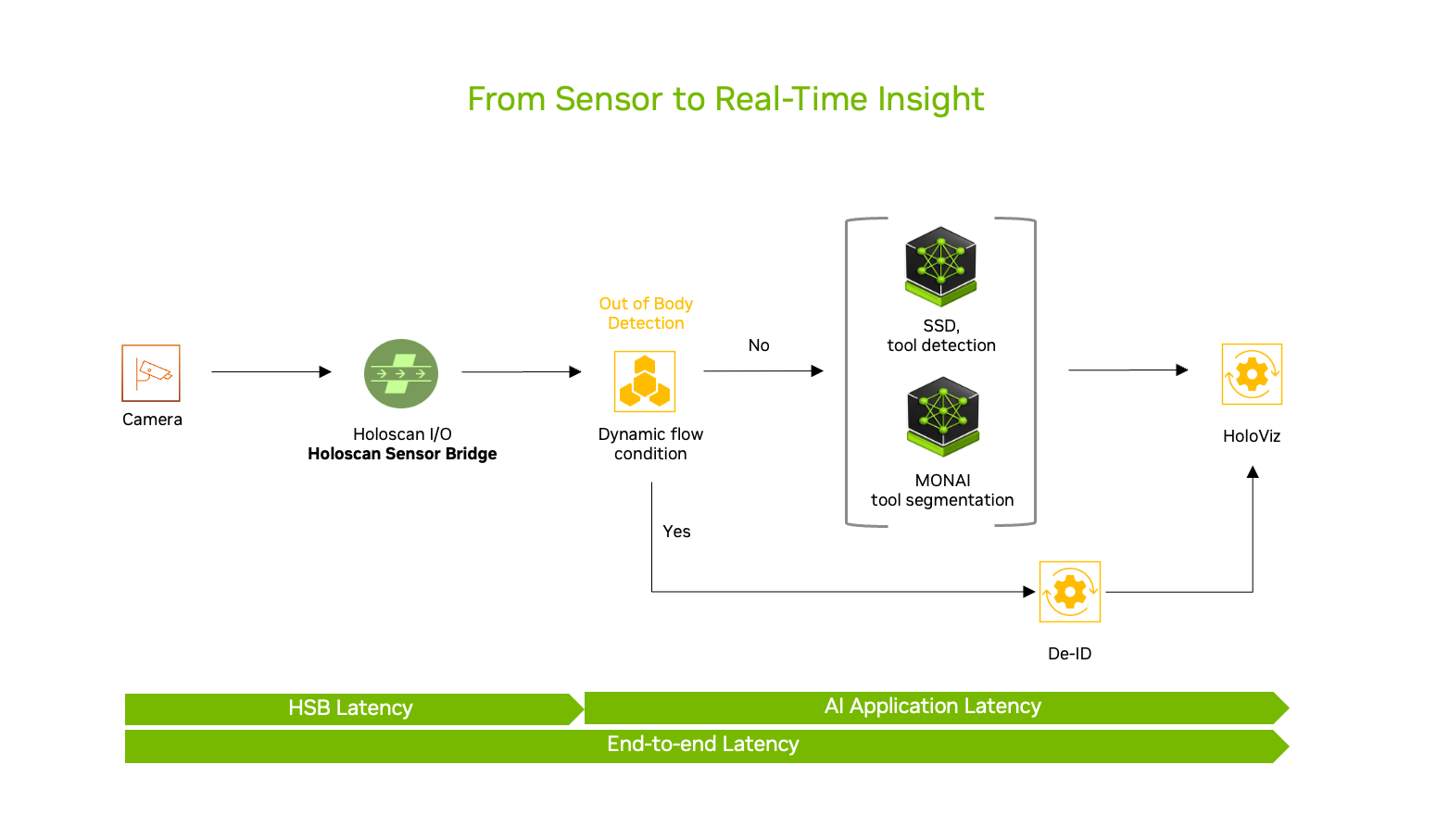
Ultra-low latency 4K stereo surgical endoscopy pipeline with real-time depth estimation on the edge. I spent a lot of time prototyping with the Holoscan SDK on NVIDIA IGX Orin and Jetson Orin (including Thor), focusing on end-to-end GPU throughput: zero-copy capture/ingest, NVDEC/NVENC, CUDA pre/post-processing, TensorRT inference, and tightly-synchronized stereo processing for consistent depth. Iterated heavily on profiling, memory movement, and scheduling to keep latency predictable for safety-critical medical imaging.